tipsy.bot Part 5 - Control
Tipsy Write-up Navigation Previous: State Estimation Next: Outcomes/Summary
NOTE: The majority of the theory for the state estimate and PID controller was inspired by and heavily adapted from Brian Dwyer’s excellent write up on the subject. You can read about it here.
Control
I implemented an empirically tuned PID controller to handle the control for Tipsy. I’ve gotten a lot of mixed input from all the research I’ve done online in terms of which terms are needed; generally people just use PD controllers. Since everything is empirically tuned I just went ahead and included the I term for my project submittal - this is definitely a future area for exploration/tuning.
The controller is attempting to minimize the error in the calculated θ where an optimal condition is θ = 0° as
defined in the schematic below:
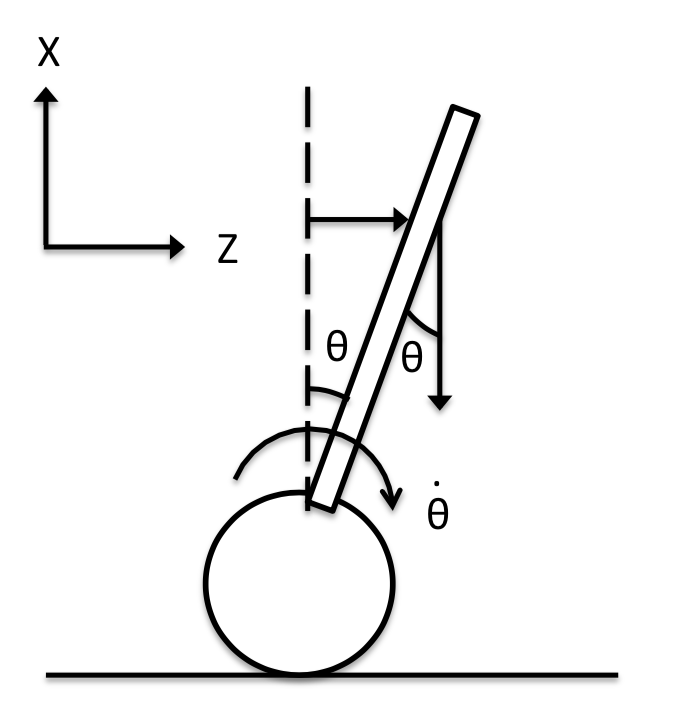
It was noted that during the tuning process, Tipsy had a tendency to fall backwards more than forwards. I suspect there was a
small eccentricity between the center of mass and the centerline of Tipsy which induced a secondary moment that was not necessarily
accounted for somewhere within the control/state estimation. Accordingly, the controller was ultimately updated to
minimize error such that the optimal condition was θ = ~1°. This was an inelegant and lazy (but simple!) way to account for
the fact that no center of mass calculations were actually done.
The control algorithm used was:
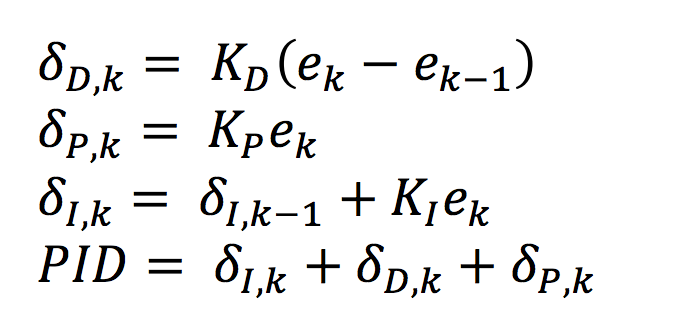
which, when implemented into my code looked like:
|
|
Tuning was done empirically which involved iteratively uploading tweaked gains to the chip, taking a sip of beer, and seeing how Tipsy performed. Eventually the gains selected for the project presentation were:
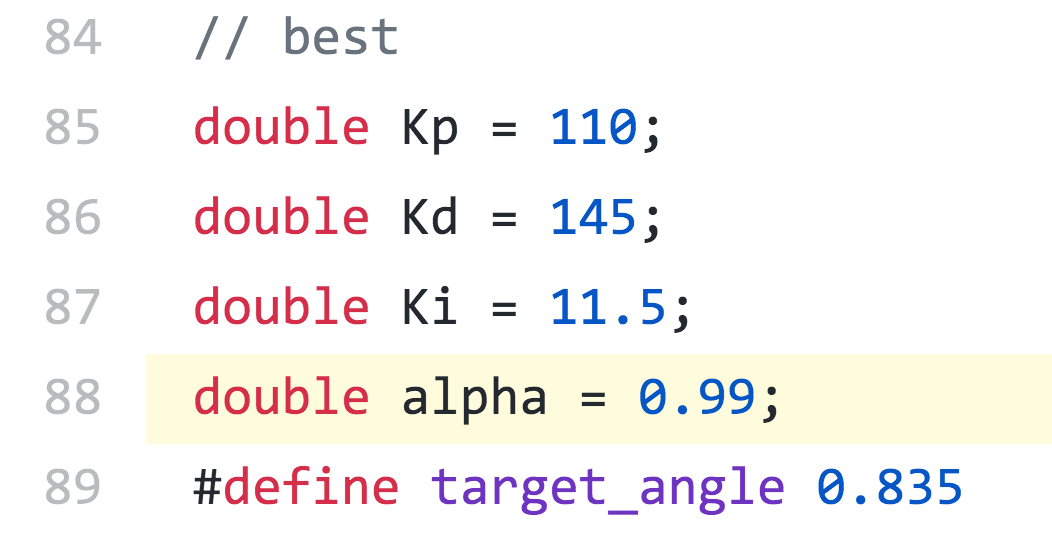
These gains/tweaked variables produced decent (but not perfect) balancing behavior.